
|
Welcome to ShortScience.org! |


|
- ShortScience.org is a platform for post-publication discussion aiming to improve accessibility and reproducibility of research ideas.
- The website has 1584 public summaries, mostly in machine learning, written by the community and organized by paper, conference, and year.
- Reading summaries of papers is useful to obtain the perspective and insight of another reader, why they liked or disliked it, and their attempt to demystify complicated sections.
- Also, writing summaries is a good exercise to understand the content of a paper because you are forced to challenge your assumptions when explaining it.
- Finally, you can keep up to date with the flood of research by reading the latest summaries on our Twitter and Facebook pages.
InfoGAN: Interpretable Representation Learning by Information Maximizing Generative Adversarial Nets
Chen, Xi and Chen, Xi and Duan, Yan and Houthooft, Rein and Schulman, John and Sutskever, Ilya and Abbeel, Pieter
Neural Information Processing Systems Conference - 2016 via Local Bibsonomy
Keywords: dblp
Chen, Xi and Chen, Xi and Duan, Yan and Houthooft, Rein and Schulman, John and Sutskever, Ilya and Abbeel, Pieter
Neural Information Processing Systems Conference - 2016 via Local Bibsonomy
Keywords: dblp













[link]
* Usually GANs transform a noise vector `z` into images. `z` might be sampled from a normal or uniform distribution.
* The effect of this is, that the components in `z` are deeply entangled.
* Changing single components has hardly any influence on the generated images. One has to change multiple components to affect the image.
* The components end up not being interpretable. Ideally one would like to have meaningful components, e.g. for human faces one that controls the hair length and a categorical one that controls the eye color.
* They suggest a change to GANs based on Mutual Information, which leads to interpretable components.
* E.g. for MNIST a component that controls the stroke thickness and a categorical component that controls the digit identity (1, 2, 3, ...).
* These components are learned in a (mostly) unsupervised fashion.
### How
* The latent code `c`
* "Normal" GANs parameterize the generator as `G(z)`, i.e. G receives a noise vector and transforms it into an image.
* This is changed to `G(z, c)`, i.e. G now receives a noise vector `z` and a latent code `c` and transforms both into an image.
* `c` can contain multiple variables following different distributions, e.g. in MNIST a categorical variable for the digit identity and a gaussian one for the stroke thickness.
* Mutual Information
* If using a latent code via `G(z, c)`, nothing forces the generator to actually use `c`. It can easily ignore it and just deteriorate to `G(z)`.
* To prevent that, they force G to generate images `x` in a way that `c` must be recoverable. So, if you have an image `x` you must be able to reliable tell which latent code `c` it has, which means that G must use `c` in a meaningful way.
* This relationship can be expressed with mutual information, i.e. the mutual information between `x` and `c` must be high.
* The mutual information between two variables X and Y is defined as `I(X; Y) = entropy(X) - entropy(X|Y) = entropy(Y) - entropy(Y|X)`.
* If the mutual information between X and Y is high, then knowing Y helps you to decently predict the value of X (and the other way round).
* If the mutual information between X and Y is low, then knowing Y doesn't tell you much about the value of X (and the other way round).
* The new GAN loss becomes `old loss - lambda * I(G(z, c); c)`, i.e. the higher the mutual information, the lower the result of the loss function.
* Variational Mutual Information Maximization
* In order to minimize `I(G(z, c); c)`, one has to know the distribution `P(c|x)` (from image to latent code), which however is unknown.
* So instead they create `Q(c|x)`, which is an approximation of `P(c|x)`.
* `I(G(z, c); c)` is then computed using a lower bound maximization, similar to the one in variational autoencoders (called "Variational Information Maximization", hence the name "InfoGAN").
* Basic equation: `LowerBoundOfMutualInformation(G, Q) = E[log Q(c|x)] + H(c) <= I(G(z, c); c)`
* `c` is the latent code.
* `x` is the generated image.
* `H(c)` is the entropy of the latent codes (constant throughout the optimization).
* Optimization w.r.t. Q is done directly.
* Optimization w.r.t. G is done via the reparameterization trick.
* If `Q(c|x)` approximates `P(c|x)` *perfectly*, the lower bound becomes the mutual information ("the lower bound becomes tight").
* In practice, `Q(c|x)` is implemented as a neural network. Both Q and D have to process the generated images, which means that they can share many convolutional layers, significantly reducing the extra cost of training Q.
### Results
* MNIST
* They use for `c` one categorical variable (10 values) and two continuous ones (uniform between -1 and +1).
* InfoGAN learns to associate the categorical one with the digit identity and the continuous ones with rotation and width.
* Applying Q(c|x) to an image and then classifying only on the categorical variable (i.e. fully unsupervised) yields 95% accuracy.
* Sampling new images with exaggerated continuous variables in the range `[-2,+2]` yields sound images (i.e. the network generalizes well).
* 
* 3D face images
* InfoGAN learns to represent the faces via pose, elevation, lighting.
* They used five uniform variables for `c`. (So two of them apparently weren't associated with anything sensible? They are not mentioned.)
* 3D chair images
* InfoGAN learns to represent the chairs via identity (categorical) and rotation or width (apparently they did two experiments).
* They used one categorical variable (four values) and one continuous variable (uniform `[-1, +1]`).
* SVHN
* InfoGAN learns to represent lighting and to spot the center digit.
* They used four categorical variables (10 values each) and two continuous variables (uniform `[-1, +1]`). (Again, a few variables were apparently not associated with anything sensible?)
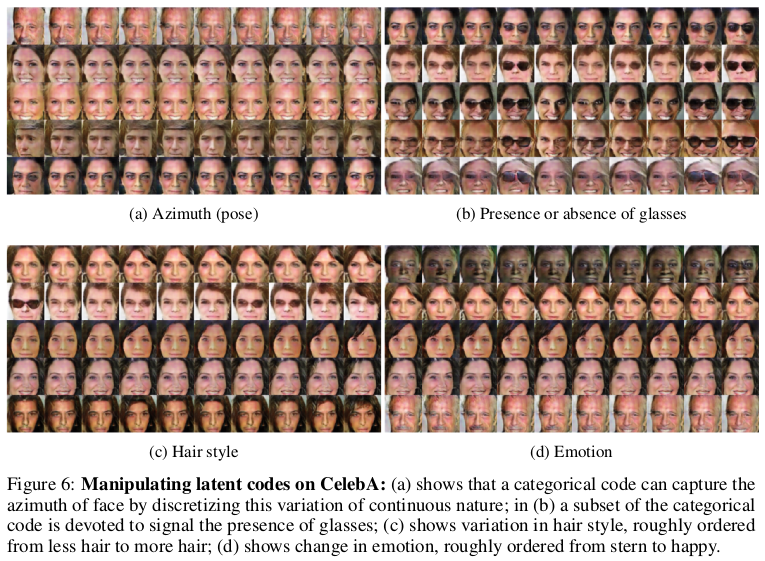
* CelebA
* InfoGAN learns to represent pose, presence of sunglasses (not perfectly), hair style and emotion (in the sense of "smiling or not smiling").
* They used 10 categorical variables (10 values each). (Again, a few variables were apparently not associated with anything sensible?)
* 
 |

Robustness of classifiers: from adversarial to random noise
Alhussein Fawzi and Seyed-Mohsen Moosavi-Dezfooli and Pascal Frossard
arXiv e-Print archive - 2016 via Local arXiv
Keywords: cs.LG, cs.CV, stat.ML
First published: 2016/08/31 (7 years ago)
Abstract: Several recent works have shown that state-of-the-art classifiers are vulnerable to worst-case (i.e., adversarial) perturbations of the datapoints. On the other hand, it has been empirically observed that these same classifiers are relatively robust to random noise. In this paper, we propose to study a \textit{semi-random} noise regime that generalizes both the random and worst-case noise regimes. We propose the first quantitative analysis of the robustness of nonlinear classifiers in this general noise regime. We establish precise theoretical bounds on the robustness of classifiers in this general regime, which depend on the curvature of the classifier's decision boundary. Our bounds confirm and quantify the empirical observations that classifiers satisfying curvature constraints are robust to random noise. Moreover, we quantify the robustness of classifiers in terms of the subspace dimension in the semi-random noise regime, and show that our bounds remarkably interpolate between the worst-case and random noise regimes. We perform experiments and show that the derived bounds provide very accurate estimates when applied to various state-of-the-art deep neural networks and datasets. This result suggests bounds on the curvature of the classifiers' decision boundaries that we support experimentally, and more generally offers important insights onto the geometry of high dimensional classification problems.
more
less
Alhussein Fawzi and Seyed-Mohsen Moosavi-Dezfooli and Pascal Frossard
arXiv e-Print archive - 2016 via Local arXiv
Keywords: cs.LG, cs.CV, stat.ML
First published: 2016/08/31 (7 years ago)
Abstract: Several recent works have shown that state-of-the-art classifiers are vulnerable to worst-case (i.e., adversarial) perturbations of the datapoints. On the other hand, it has been empirically observed that these same classifiers are relatively robust to random noise. In this paper, we propose to study a \textit{semi-random} noise regime that generalizes both the random and worst-case noise regimes. We propose the first quantitative analysis of the robustness of nonlinear classifiers in this general noise regime. We establish precise theoretical bounds on the robustness of classifiers in this general regime, which depend on the curvature of the classifier's decision boundary. Our bounds confirm and quantify the empirical observations that classifiers satisfying curvature constraints are robust to random noise. Moreover, we quantify the robustness of classifiers in terms of the subspace dimension in the semi-random noise regime, and show that our bounds remarkably interpolate between the worst-case and random noise regimes. We perform experiments and show that the derived bounds provide very accurate estimates when applied to various state-of-the-art deep neural networks and datasets. This result suggests bounds on the curvature of the classifiers' decision boundaries that we support experimentally, and more generally offers important insights onto the geometry of high dimensional classification problems.
|
[link]
Fawzi et al. study robustness in the transition from random samples to semi-random and adversarial samples. Specifically they present bounds relating the norm of an adversarial perturbation to the norm of random perturbations – for the exact form I refer to the paper. Personally, I find the definition of semi-random noise most interesting, as it allows to get an intuition for distinguishing random noise from adversarial examples. As in related literature, adversarial examples are defined as
$r_S(x_0) = \arg\min_{x_0 \in S} \|r\|_2$ s.t. $f(x_0 + r) \neq f(x_0)$
where $f$ is the classifier to attack and $S$ the set of allowed perturbations (e.g. requiring that the perturbed samples are still images). If $S$ is mostly unconstrained regarding the direction of $r$ in high dimensional space, Fawzi et al. consider $r$ to be an adversarial examples – intuitively, and adversary can choose $r$ arbitrarily to fool the classifier. If, however, the directions considered in $S$ are constrained to an $m$-dimensional subspace, Fawzi et al. consider $r$ to be semi-random noise. In the extreme case, if $m = 1$, $r$ is random noise. In this case, we can intuitively think of $S$ as a randomly chosen one dimensional subspace – i.e. a random direction in multi-dimensional space.
Also find this summary at [davidstutz.de](https://davidstutz.de/category/reading/).
|

Mask R-CNN
He, Kaiming and Gkioxari, Georgia and Dollár, Piotr and Girshick, Ross B.
arXiv e-Print archive - 2017 via Local Bibsonomy
Keywords: dblp
He, Kaiming and Gkioxari, Georgia and Dollár, Piotr and Girshick, Ross B.
arXiv e-Print archive - 2017 via Local Bibsonomy
Keywords: dblp
|
[link]
Mask RCNN takes off from where Faster RCNN left, with some augmentations aimed at bettering instance segmentation (which was out of scope for FRCNN). Instance segmentation was achieved remarkably well in *DeepMask* , *SharpMask* and later *Feature Pyramid Networks* (FPN). Faster RCNN was not designed for pixel-to-pixel alignment between network inputs and outputs. This is most evident in how RoIPool , the de facto core operation for attending to instances, performs coarse spatial quantization for feature extraction. Mask RCNN fixes that by introducing RoIAlign in place of RoIPool. #### Methodology Mask RCNN retains most of the architecture of Faster RCNN. It adds the a third branch for segmentation. The third branch takes the output from RoIAlign layer and predicts binary class masks for each class. ##### Major Changes and intutions **Mask prediction** Mask prediction segmentation predicts a binary mask for each RoI using fully convolution - and the stark difference being usage of *sigmoid* activation for predicting final mask instead of *softmax*, implies masks don't compete with each other. This *decouples* segmentation from classification. The class prediction branch is used for class prediction and for calculating loss, the mask of predicted loss is used calculating Lmask. Also, they show that a single class agnostic mask prediction works almost as effective as separate mask for each class, thereby supporting their method of decoupling classification from segmentation **RoIAlign** RoIPool first quantizes a floating-number RoI to the discrete granularity of the feature map, this quantized RoI is then subdivided into spatial bins which are themselves quantized, and finally feature values covered by each bin are aggregated (usually by max pooling). Instead of quantization of the RoI boundaries or bin bilinear interpolation is used to compute the exact values of the input features at four regularly sampled locations in each RoI bin, and aggregate the result (using max or average). **Backbone architecture** Faster RCNN uses a VGG like structure for extracting features from image, weights of which were shared among RPN and region detection layers. Herein, authors experiment with 2 backbone architectures - ResNet based VGG like in FRCNN and ResNet based [FPN](http://www.shortscience.org/paper?bibtexKey=journals/corr/LinDGHHB16) based. FPN uses convolution feature maps from previous layers and recombining them to produce pyramid of feature maps to be used for prediction instead of single-scale feature layer (final output of conv layer before connecting to fc layers was used in Faster RCNN) **Training Objective** The training objective looks like this  Lmask is the addition from Faster RCNN. The method to calculate was mentioned above #### Observation Mask RCNN performs significantly better than COCO instance segmentation winners *without any bells and whiskers*. Detailed results are available in the paper |

Exploiting local features from deep networks for image retrieval
Ng, Joe Yue-Hei and Yang, Fan and Davis, Larry S.
Conference and Computer Vision and Pattern Recognition - 2015 via Local Bibsonomy
Keywords: dblp
Ng, Joe Yue-Hei and Yang, Fan and Davis, Larry S.
Conference and Computer Vision and Pattern Recognition - 2015 via Local Bibsonomy
Keywords: dblp
|
[link]
In this paper, the authors raise a very important point for instance based image retrieval. For a task like an image recognition features extracted from higher layer of deep networks works really well in general, but for task like instance based image retrieval features extracted from higher layers don't prove to be that useful, so the authors suggest that we take features from lower layer and on those features, apply [VLAD encoding](https://www.robots.ox.ac.uk/~vgg/publications/2013/arandjelovic13/arandjelovic13.pdf). On top of the VLAD encoding as part of post processing, we perform steps like intra-normalisation and then apply PCA and reduce the encoding to a size of 128 Dimension. The authors have performed their experiments using [Googlenet](https://www.cs.unc.edu/~wliu/papers/GoogLeNet.pdf) and [VGG-16](https://arxiv.org/pdf/1409.1556v6.pdf), and they tried Inception 3a, Inception 4a and Inception 4e on GoogleNet and conv4_2, conv5_1 and conv5_2 on VGG-16. The above mentioned layers has almost similar performance on the dataset they have used. The performance metric used by the authors is Mean Average Precision(MAP). |

Improving neural networks by preventing co-adaptation of feature detectors
Geoffrey E. Hinton and Nitish Srivastava and Alex Krizhevsky and Ilya Sutskever and Ruslan R. Salakhutdinov
arXiv e-Print archive - 2012 via Local arXiv
Keywords: cs.NE, cs.CV, cs.LG
First published: 2012/07/03 (11 years ago)
Abstract: When a large feedforward neural network is trained on a small training set, it typically performs poorly on held-out test data. This "overfitting" is greatly reduced by randomly omitting half of the feature detectors on each training case. This prevents complex co-adaptations in which a feature detector is only helpful in the context of several other specific feature detectors. Instead, each neuron learns to detect a feature that is generally helpful for producing the correct answer given the combinatorially large variety of internal contexts in which it must operate. Random "dropout" gives big improvements on many benchmark tasks and sets new records for speech and object recognition.
more
less
Geoffrey E. Hinton and Nitish Srivastava and Alex Krizhevsky and Ilya Sutskever and Ruslan R. Salakhutdinov
arXiv e-Print archive - 2012 via Local arXiv
Keywords: cs.NE, cs.CV, cs.LG
First published: 2012/07/03 (11 years ago)
Abstract: When a large feedforward neural network is trained on a small training set, it typically performs poorly on held-out test data. This "overfitting" is greatly reduced by randomly omitting half of the feature detectors on each training case. This prevents complex co-adaptations in which a feature detector is only helpful in the context of several other specific feature detectors. Instead, each neuron learns to detect a feature that is generally helpful for producing the correct answer given the combinatorially large variety of internal contexts in which it must operate. Random "dropout" gives big improvements on many benchmark tasks and sets new records for speech and object recognition.
|
[link]
This paper introduced Dropout, a new layer type. It has a parameter $\alpha \in (0, 1)$. The output dimensionality of a dropout layer is equal to its input dimensionality. With a probability of $\alpha$ any neurons output is set to 0. At testing time, the output of all neurons is multiplied with $\alpha$ to compensate for the fact that no output is set to 0. A much better paper, by the same authors but 2 years later, is [Dropout: a simple way to prevent neural networks from overfitting](http://www.shortscience.org/paper?bibtexKey=journals/jmlr/SrivastavaHKSS14). Dropout can be interpreted as training an ensemble of many networks, which share weights. It was notably used by [ImageNet Classification with Deep Convolutional Neural Networks](http://www.shortscience.org/paper?bibtexKey=krizhevsky2012imagenet). |
